Week 8: Kalman Filter
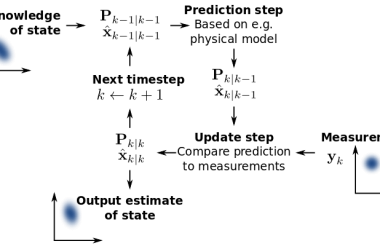
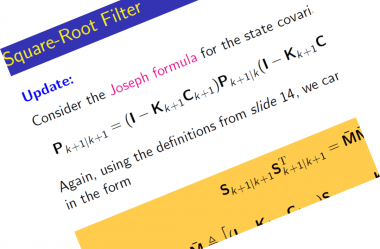
This week, I finally start talking about the Kalman filter! In particular, in Chapter 4, I present the classic filter formulations (discrete-time and continuous-time), while, in Chapter 5, I address some computational issues and show some tools to overcome them. Material: Chapter 4: Kalman Filter Chapter 5: Computational Aspects of the Kalman Filter Computational Exercise #2 Previous post of this course: Week 1: Syllabus + Introduction Week 2: Linear Algebra + Linear Systems Week 3: Set + Probability + Random Variables Week 4: Random Variables Continue→