Description
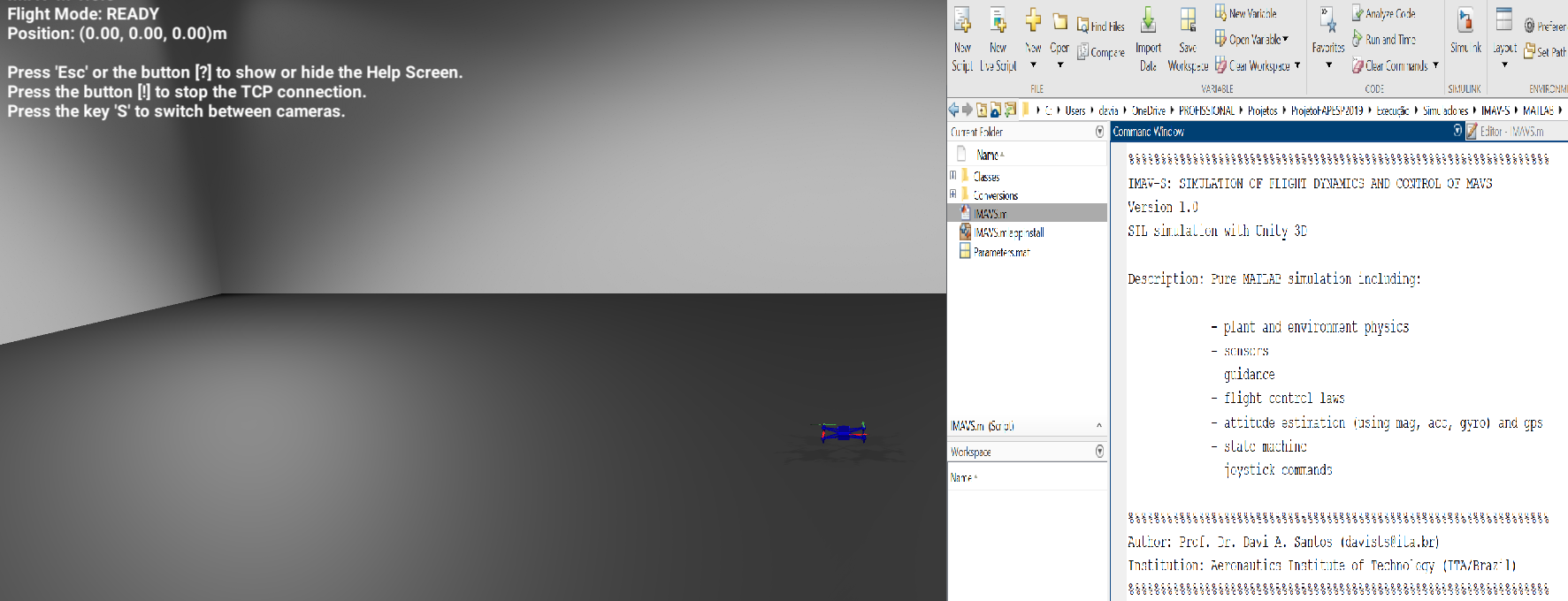
IMAV-S is a software-in-the-loop simulator of flight control, guidance, and navigation of multirotor aerial vehicles (MAVs). The MAV physics, the actuators and sensors, as well as the flight control, guidance, and navigation algorithms are all coded in MATLAB in a (pseudo) real-time fashion. On the other hand, IMAV-S provides a virtual indoor flight arena developed in Unity 3D, which communicates with the MATLAB application via a TCP socket. The simulator also includes interfaces for a PS4 joystick (or a compatible one). The joystick allows the user to interact with the simulator as it was a real radio-controlled drone featured with conventional flight modes like “manual”, “auto take-off”, “auto landing”, and “auto waypoint-based guidance”. IMAV-S is intended for helping students, researchers, and developers who are interested in both drones and eVTOL aircrafts. For learning more about the fundamentals of flight control of MAVs and the methods adopted in IMAV-S, you can access the page of my course on Dynamic Modeling and Control of Multirotor Aerial Vehicles.
Click here to go to the page of IMAV-M, a MATLAB/Octave MAV simulator intended for generating plots for scientific reports, papers, dissertations, etc.
How to use it
The MATLAB codes of IMAV-S are available on GitHub. I advise you to first fork this repo into your GitHub profile and then to clone your fork on your computer. On this repo, you are going to find a readme.md which will give you the directions to run the simulator.
The virtual indoor flight arena is not an open-source project yet. So, for running the simulator as described on the above-referenced GitHub repository, you need to download and extract the executable arena application on your computer:
Link for downloading the virtual indoor flight arena (executable)
This Unity 3D game has been developed by Mr. Nicolas Granese.
Acknowledgment
I would like to thank a lot all my students and colleagues who somehow helped me to start this project. Many of the ideas and methods implemented in IMAV-M have been discussed in the graduate courses MP-282 Dynamic Modeling and Control of Multirotor Aerial Vehicles and MP-208 Optimal Filtering with Aerospace Applications, which I have offered since 2014 in the Aeronautics and Mechanics Graduate Program at ITA/Brazil. Of course, those ideas are also detailed in our journal and conference papers. I am also grateful to the research agencies which supported this project: FAPESP (grant 2019/05334-0) and CNPq (302637/2018-4).