Description
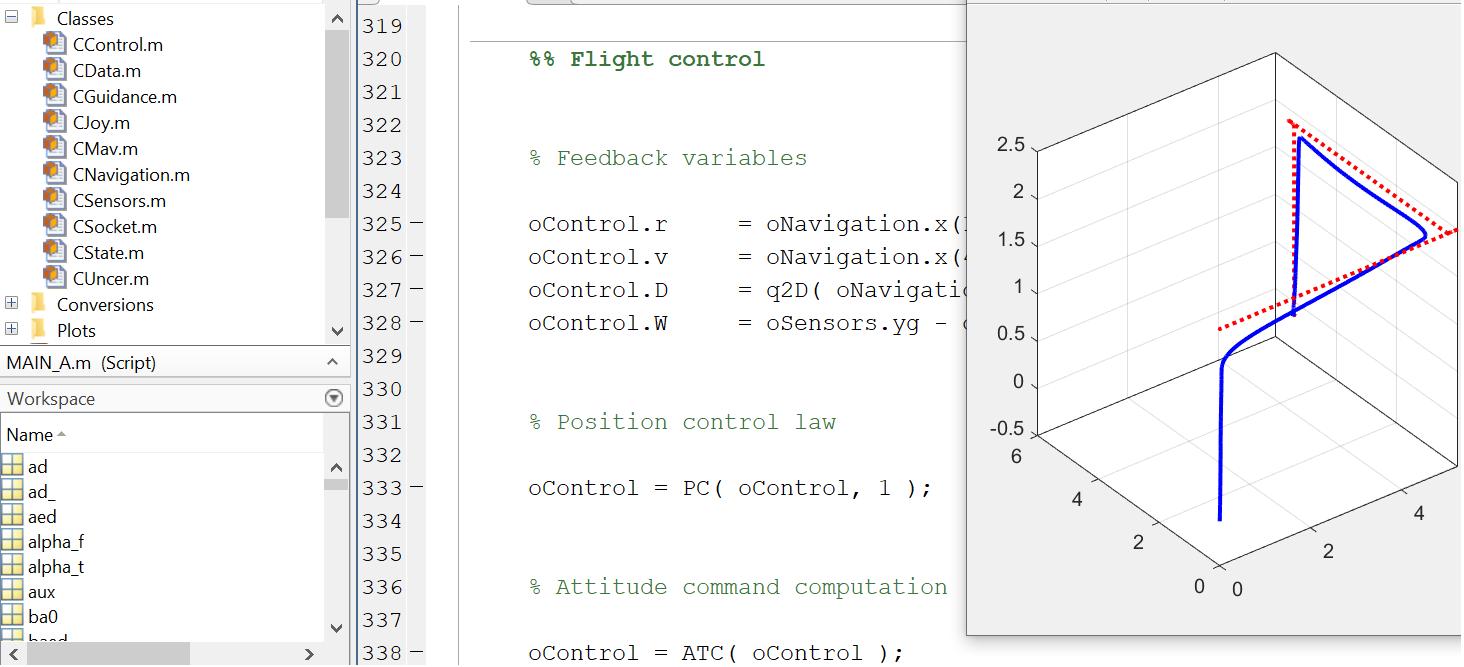
IMAV-M is a MATLAB/Octave simulator of flight control, guidance, and navigation of multirotor aerial vehicles (MAVs). It is not real-time. At the end of the simulation, it just shows you the curves of position, velocity, attitude, control efforts, and so on. It is intended for helping students, researchers, and developers who are interested in both drones and eVTOL aircrafts. For learning more about the fundamentals of flight control of MAVs and the methods adopted in IMAV-M, you can access the page of my course on Dynamic Modeling and Control of Multirotor Aerial Vehicles.
Click here to go to the page of IMAV-S, a software-in-the-loop MAV simulator, which runs in (pseudo) real time and contains a virtual indoor arena for flight demonstrations.
How to use it
The codes of IMAV-M are available on GitHub. I advise you to first fork this repo into your GitHub profile and then to clone your fork on your computer. On this repo, you are going to find a readme.md which will give you the directions to run the simulator.
If you don’t have a MATLAB license, no problem! You can alternatively run and modify this simulator using GNU Octave, which is open-source.
Acknowledgment
I would like to thank a lot all my students and colleagues who somehow helped me to start this project. Many of the ideas and methods implemented in IMAV-M have been discussed in the graduate courses MP-282 Dynamic Modeling and Control of Multirotor Aerial Vehicles and MP-208 Optimal Filtering with Aerospace Applications, which I have offered since 2014 in the Aeronautics and Mechanics Graduate Program at ITA/Brazil. Of course, those ideas are also detailed in our journal and conference papers. I am also grateful to the research agencies which supported this project: FAPESP (grant 2019/05334-0) and CNPq (302637/2018-4).