Week 7: Parameter Estimation + Kalman Filter
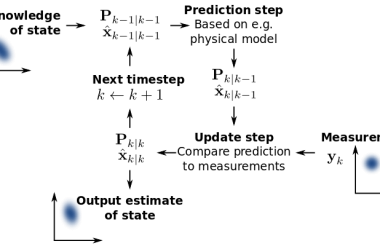
This week, I finish Chapter 3 (about parameter estimation) initiated in Week 6 and start presenting Chapter 4 (about state estimation). Regarding Chapter 3, I particularly present the two remaining estimation criterion: maximum a posteriori probability (MAP) and minimum mean square error (MMSE). On the other hand, regarding Chapter 4, I define the linear-Gaussian state estimation problem and start to present its exact solution (which is the well-known Kalman filter!). Material: Chapter 3: Parameter Estimation Chapter 4: Kalman Filter Previous post of this course: Week Continue→